ANATIS > NOTICE > 38020300


INTRODUCTION
Avant d’utiliser ANATIS nous vous recommandons de lire attentivement la notice d’instruction fournie avec votre machine, et d’en respecter scrupuleusement les instructions. Vous éviterez ainsi de vous mettre en danger, vous réduirez les temps de mise en service et les risques d’incidents fâcheux hors période de garantie.
Cette notice d’instructions contient toutes les informations pratiques pour faire fonctionner, manier, régler et entretenir votre machine correctement et en sécurité. Lisez-la attentivement et respectez toutes les instructions et tous les conseils relatifs à votre sécurité.
Ces recommandations doivent être strictement suivies à tout moment lors de l’emploi et de l’entretien de la machine. Un manquement au suivi des avertissements de sécurité de la notice d’utilisation, des guides sur la machine et/ou une utilisation différente de celle préconisée dans la notice d’utilisation peut entraîner une défaillance de la machine et/ou des blessures.
Conservez la notice d’utilisation pour pouvoir la consulter ultérieurement. Garder la à portée de main en permanence, à proximité de la machine ou dans un endroit facilement accessible. Assurez-vous que tout personnel impliqué dans l’utilisation de cette machine puisse la consulter périodiquement.
En cas de prêt de la machine transmettez cette notice à tout autre utilisateur.

Recommandation d’une importance particulière

Symbole de mise en garde
La présente notice donne des instructions en vue de l’utilisation des équipements et des options disponibles sur votre ANATIS. De plus, votre revendeur vous conseillera pour que vous puissiez obtenir la meilleure performance de votre outil, et que votre satisfaction soit totale.
Ne pas ôter les plaques du constructeur et du marquage CE fixées sur la machine.
Respectez les consignes de sécurité
CARRÉ décline toutes responsabilités pour les dommages et incidents de fonctionnement survenus à la suite d’utilisations non conformes aux instructions du présent manuel.
DESCRIPTION PRODUIT
ANATIS est un robot autonome 100% électrique dédié aux travaux de désherbage mécanique dans les exploitations maraichères.
Les dimensions du robot :
- Hauteur = 2m
- Largeur = 1,75m à 2.35m (en fonction de la voie)
- Longueur = 3,20m (avec bineuse standard)
- Poids = 1 450kg (avec bineuse standard)
Sens d’avancement : le pack batterie est situer à l’avant du robot et le relevage à l’arrière. Toutes les directions (droite, gauche) indiquées dans la suite de la documentation seront dans le sens d’avancement.
Le désherbage est réalisé avec une bineuse attelée à l’attelage trois points de catégorie 1 situé à l’arrière du robot.
Les bineuses disponibles pour ANATIS sont construites par CARRE avec plus de 80 ans d’expériences.
Dans sa configuration standard ANATIS est composée :
- D’un mat escamotable avec système de détection d’obstacle Lidar.
- D’un pack batterie lithium-ion interchangeable.
- D’une voie réglable de 1.45m/ 1.65m/ 1.85m/ 2.05m.
- D’un dispositif lumineux composé de LED à l’avant du robot et d’une colonne lumineuse (verte, orange, rouge) sur le haut du robot.
- D’une armoire de rangement (côté gauche).
- D’une armoire de contrôle (côté droit) où se situent les écrans de contrôle.
- D’un relevage arrière 3 points de catégorie 1 avec une capacité de relevage de 350kg.
- De 4 roues motrice est directrice de 1.7kw chacune et disposant d’un angle de braquage de +30°/-30°.
- De 2 antennes TRIMBLE, une à l’avant du robot et une à l’arrière.
- D’une radiocommande de contrôle.
- D’une tablette tactile.
ANATIS peut se déplacer en crabe ainsi que de réaliser une rotation à 360 degrés sur lui-même ce qui lui permet de réaliser des demi-tours en boue de champs dans une surface très restreinte (5m).
Etant 100% électrique, l’énergie est stocké dans un pack batterie lithium-ion situer à l’avant du robot. Ce pack batterie est interchangeable, il est fixé sur le robot par un attelage triangle retenu par un axe.
Le guidage est réalisé grâce au GPS Trimble et à ses deux antennes AV28, une situé à l’avant du robot et la seconde à l’arrière pour un meilleur guidage et l’obtention d’un cap en permanence.
Anatis dispose de sa propre tablette tactile déporté avec une application dédié au robot. Cette application permet de suivre les interventions de maintenance et d’entretien réalisées sur le robot. De plus une canne d’arpentage peut-être vendu avec le robot, cette canne d’arpentage permet d’enregistrer des points GPS grâce à l’application sur la tablette, pour ensuite les envoyer au robot. Il est également possible de gérer ces parcelles directement sur l’application.
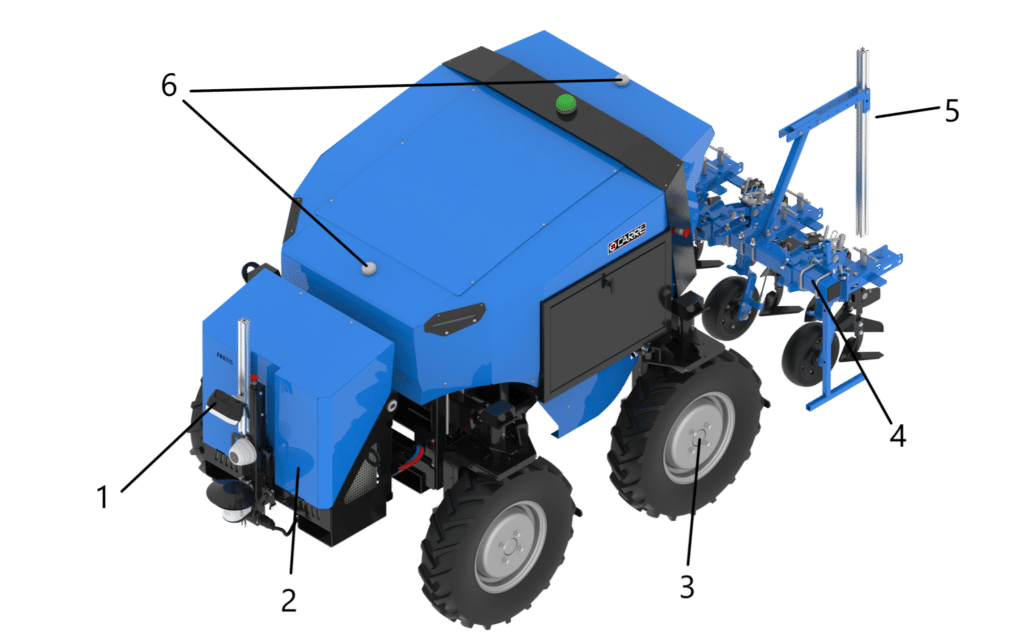
- Mat escamotable : caméra de guidage Claas 2D pour guider le robot, Lidar pour détecter les objets, arrêt d’urgence.
- Pack batterie lithium-ion interchangeable.
- Roue motrice et directrice avec moteur intègre de 1.7kw.Bineuse CARRE.Mat de fixation pour caméra de guidage outil.
- Antenne double pour guidage et obtention du cap.
Option
- Caméra à l’avant : la caméra Claas 2D positionné sur le mat escamotable permet de guidé le robot sur la culture dans de légère courbe.
- Guidage outil : un vérin de translation, positionné sur le relevage, d’une course de 300mm additionné à une caméra Claas 2D positionné sur la bineuse. Cela lui permet de suivre le rang de culture et d’intervenir au plus près du plan de culture.
- Canne d’arpentage : permet d’enregistrer des points GPS pour les transmettre au robot.
UTILISATION ET REGLAGE
Radiocommande
La radiocommande a été conçue pour Anatis, elle permet de déplacer le robot hors des planches en mode manuel et d’enclencher le mode semi-autonome et mode autonome.
Procédure de démarrage de radiocommande

Pour mettre en marche la radiocommande :
- Vérifiez que l’arrêt d’urgence ne soit pas enclenché. Il faut au préalable mettre le robot sous tension (voir PROCEDURE DE MISE EN FONCTION DU ROBOT).
- Appuyez sur le bouton vert situé sous la radiocommande.
- Appuyer une seconde fois sur le bouton afin de confirmer le démarrage.
Une fois l’application lancée sur l’IHM (Interface Homme Machine) du robot.
- Appuyé sur AUX1 (9), une boîte de dialogue s’affichera sur l’écran du robot.
- Confirmé en sélectionnant ok.
- Appuyer sur AUX1 une nouvelle fois. Un bruit d’enclenchement dois ce faire entendre. Votre robot est prêt.
Utilisation de la radiocommande
Les déplacements du robot s’effectuent avec les deux joysticks de la radiocommande. Pour tous mouvements effectués avec les joysticks il faut que l’homme mort soit enclenché (4).

Joystick gauche (B) :
- Joystick en avant : Marche avant avec vitesse proportionnelle au joystick.
- Joystick en arrière : Marche arrière avec vitesse proportionnelle au joystick.
- Joystick vers la droite : Mise en crabe de la machine vers la droite, modulation selon la poussée exercée sur le joystick
- Joystick vers la gauche : Mise en crabe de la machine vers la gauche, modulation selon la poussée exercée sur le joystick
Joystick droit (C) :
- Joystick vers la droite : Rotation du robot vers la droite, modulation selon la poussée exercée sur le joystick
- Joystick vers la gauche : Rotation du robot vers la gauche, modulation selon la poussée exercée sur le joystick
- Aucune réactivité si joystick en avant ou en arrière
Il est également à noter qu’il est possible d’effectuer des mouvements simultanément :
- Marche avant ou arrière en commandant les vérins de direction
Les interrupteurs présents sur la radiocommande ont les fonctions suivantes :
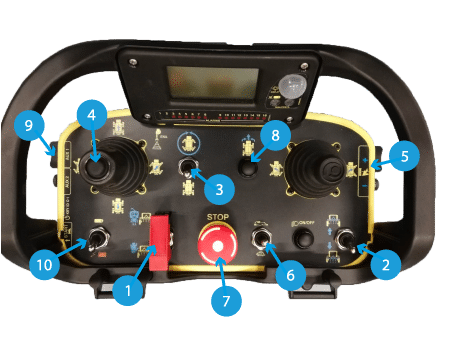
- (1) Passage du mode semi-autonome au mode autonome (lors d’une opération en mode semi-autonome, la radiocommande propose au bout de 30 secondes le passage au mode autonome en signalant « mode auto OK ». Actionner l’interrupteur vers le haut et appuyer simultanément sur l’homme-mort permet le passage au mode autonome).
- (2) Interrupteur vers le haut : Montée de l’outil
- (2) Interrupteur vers le bas : descente de l’outil
- (3) Mode rotation sur lui-même (attendre que le robot soit à l’arrêt avant d’enclencher l’interrupteur)
- (4) Homme mort
- (5) Réglage précis du relevage
- (6) Interrupteur de sélection de vitesse (lente, rapide)
- (7) Arrêt d’urgence
- (8) Réaxement des roues (roues droites)
- (9) AUX1 : permet la synchronisation de la radiocommande avec le robot
- (10) Passage mode batterie au mode câble. Il est possible de brancher la radiocommande directement sur le chargeur ou de travailler avec une batterie.
Il est important de noter que si la radiocommande est arrêtée, le robot n’est plus commandé, il se stoppera immédiatement, même en mode automatique. La radiocommande à une portée de 500m (en bonne condition et si il n’y a pas d’obstacle), si la distance qui sépare le robot de la radiocommande dépasse cette distance la radiocommande passera en sécurité et le robot se stoppera.
Robot
Procédure de mise en fonction du robot
- Vérifier que le pack batterie est physiquement branché au robot et bien fixé à ce dernier.Vérifier l’état de la batterie du robot (supérieur à 30% en cas de travail).
- Vérifier que les arrêts d’urgence ne soient pas enclenchés.Vérifier l’enclenchement du coupe-batterie.
- Ouvrir l’application ANATIS sur le bureau de l’IHM (cela ce fait automatiquement lorsque le coupe-batterie est n’est plus enclenché).
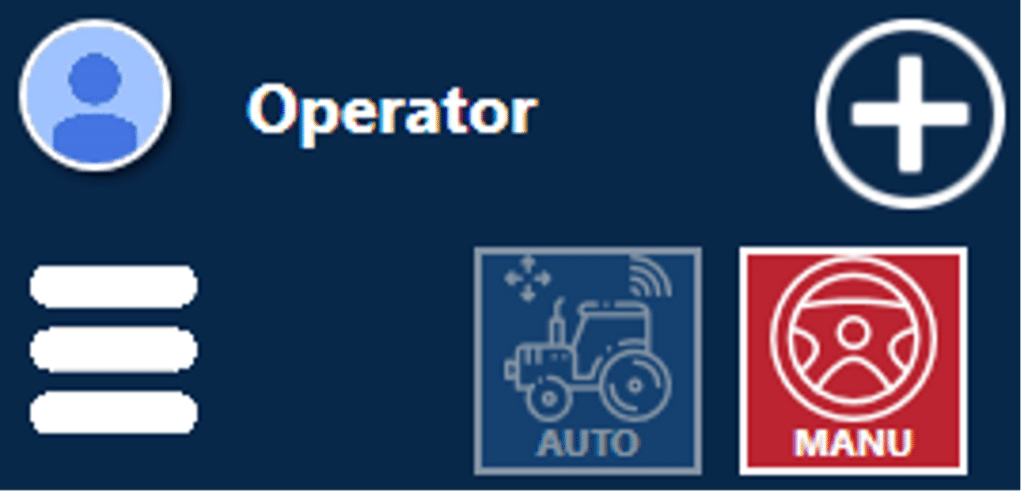
- Identifier vous grâce à la boîte de dialogue qui s’ouvrira quand vous sélectionnerez le logo « plus » en haut à gauche.
- Allumer la radiocommande (voir « procédure de démarrage radiocommande »).
- Enclencher le mode manuel sur l’IHM du robot et valider avec la radiocommande afin d’enclencher la puissance (voir procédure de démarrage radiocommande).
- Attendre 1 minute pour que les vérins se calibrent et que le robot soit 100% opérationnelle.
Lors de la manipulation en mode MANUEL, faire attention à l’encombrement du robot ainsi qu’à sa distance d’arrêt : en mode manuel aucun outil de détection d’obstacles n’est activé.
Procédure de création des planches
Il est préférable lors de ces procédures, de se placer en face des planches de travail.
- Prévoir de dégager les points d’entrées et de sorties des planches afin que le robot puisse effectuer son demi-tour en toute sécurité (préconiser un dégagement de 5m minimum).
- Vérifier qu’il n’y a pas d’obstacles sur le parcours.
- Sur l’application sélectionner l’onglet « parcelles »
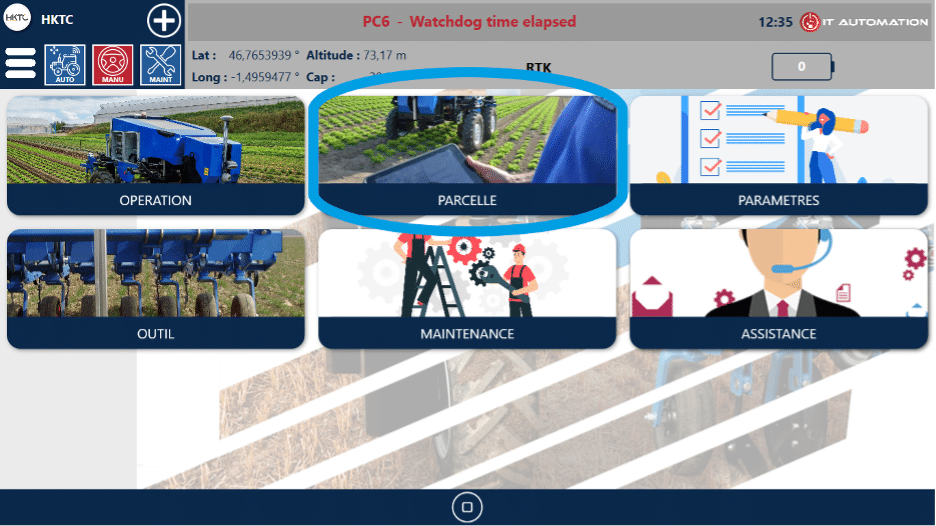
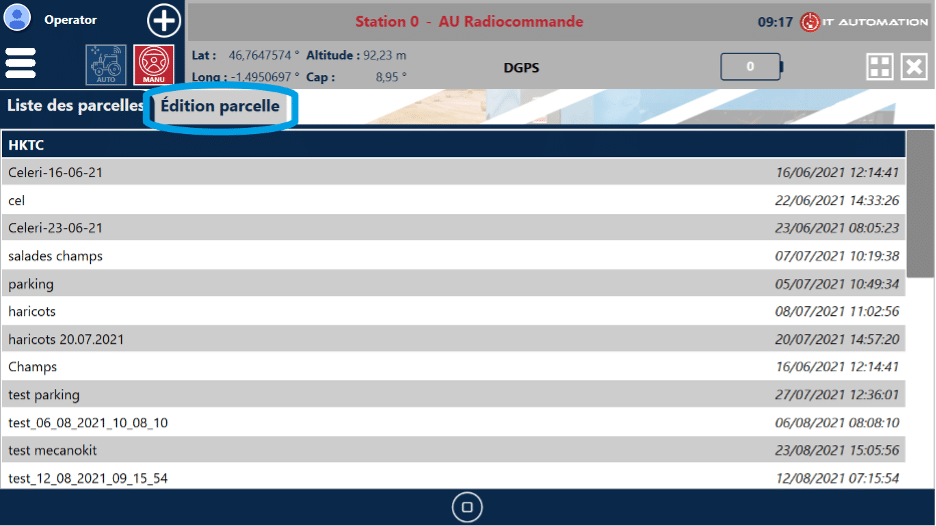
- Sélectionner “édition parcelle”
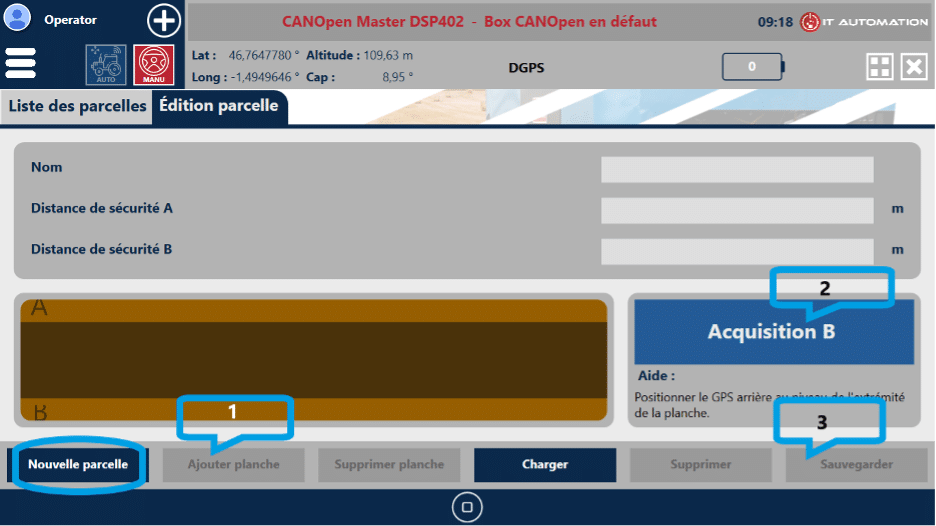
- Sélectionner “nouvelle parcelle”
- Nommer la parcelle
- Renseigner les valeurs suivantes :
- Distance de sécurité A = 4m (Minimum)
- Distance de sécurité B = 4m (Minimum)
Procédure de création des planches
Il est préférable lors de ces procédures, de se placer en face des planches de travail.
- Sélectionner “édition parcelle”
- Sélectionner “nouvelle parcelle”
- Nommer la parcelle
- Renseigner les valeurs suivantes :
- Distance de sécurité A = 4m (Minimum)
- Distance de sécurité B = 4m (Minimum)
- Ajouter le nombre de planches nécessaires au travail grâce à l’icône « ajouter planche » en bas de la page.
- Enregistrer les points GPS :
- Pointer chaque point d’entrée et de sortie de chacune des planches. Les points sélectionnés sont de couleur bleu, les point acquit sont de couleur rouge, les point non enregistrer sont de couleur gris.
- Sélectionner le point que vous voulez enregistrer placer le robot à l’endroit du point et appuyé sur acquisition.
- Sauvegarder quand tous les points sont enregistrés.
Les points de transport permettent de créer des zones au travail sur lesquels l’outil attelé sur le robot sera en position haute. Ceci lui permet de passé au-dessus d’obstacle ou de ne pas travailler le sol sur des zones sensibles. Pour créer une zone de transport il faut ajouter et enregistrer 2 points supplémentaires pour délimiter la zone.
Procédure de création de point de transport :
- Les points enregistrés seront de couleur verte.
Il est possible de réaliser la création de parcelle et de planche sans utiliser le robot, pour cela il suffit d’utiliser la canne d’arpentage et la tablette fournit avec le robot.
Procédure de création d’outil
La création des outils est très importante dans la préparation avant de lancer le robot en mode autonome. La vitesse de travail et la hauteur du relevage va dépendre de l’outil.
- Atteler l’outil que l’on souhaite enregistrer dans le robot.
- Se rendre dans le menu outil

- Sélectionné nouvel outil
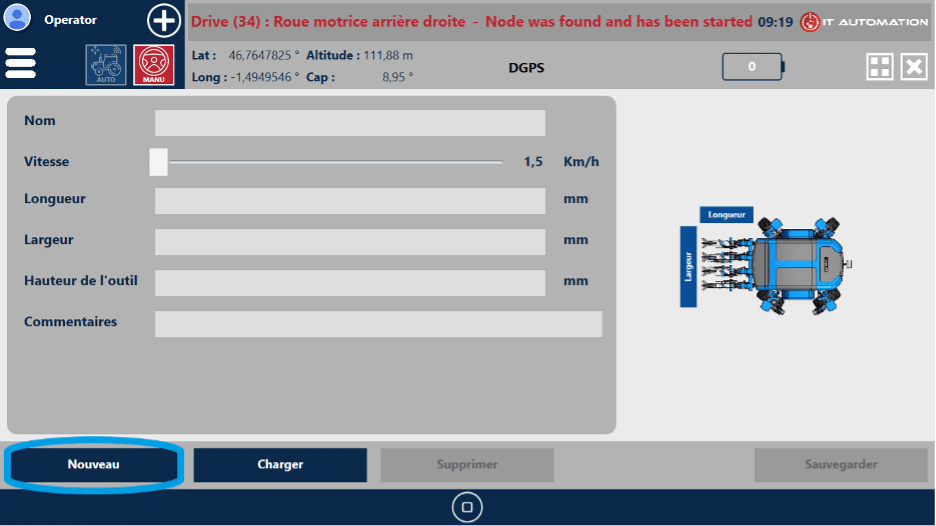
- Entrer un nom à l’outil.
- Indiquer la vitesse à laquelle vous voulez que le robot travail via le curseur (2).
- Entrer les dimensions de l’outil (Longueur/Largeur).
- Régler la hauteur de l’outil à laquelle vous voulez que l’outil soit au travail.
- Placer le robot sur une planche où l’outil interviendra.
- Baisser l’outil, avec la radiocommande, jusqu’à la position de travail souhaité garder cette position jusqu’à l’enregistrement de votre outil.
- Ajouter un commentaire si besoin
- Sélectionner « Sauvegarder », votre configuration d’outil est enregistrer
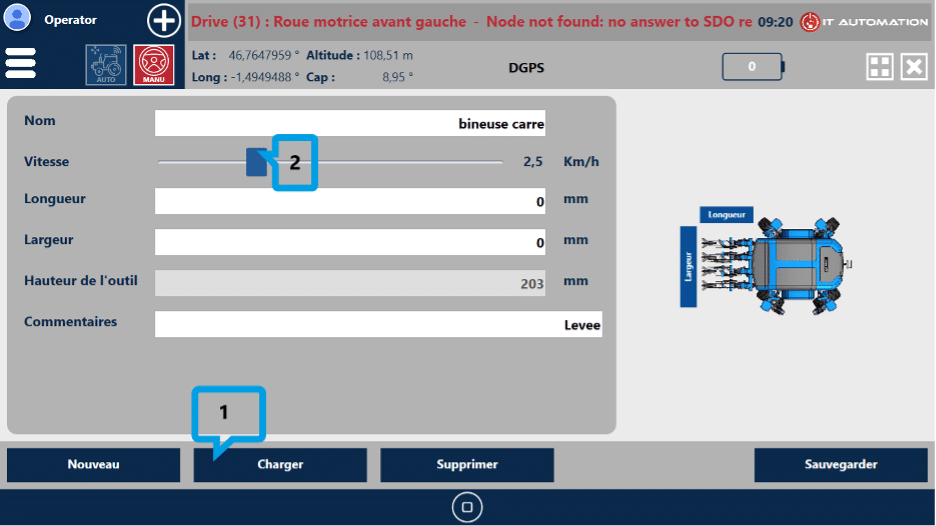
Pour modifié un outil, dans le menu outil sélectionné l’onglet “charger” (1) sélectionné l’outil a modifier réaliser les modification. et enfin sauvegarder.
Procédure pour le travail en mode semi-autonome
- Entrez dans l’onglet « opération »
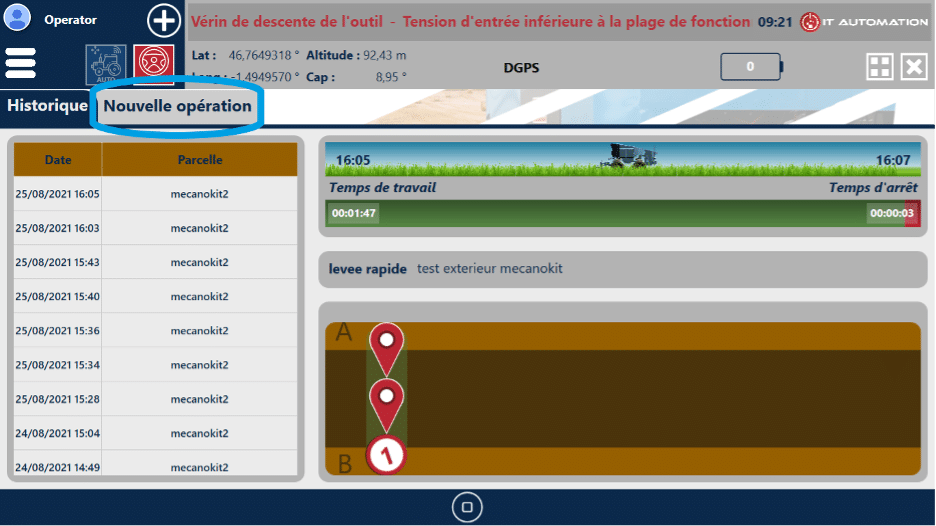
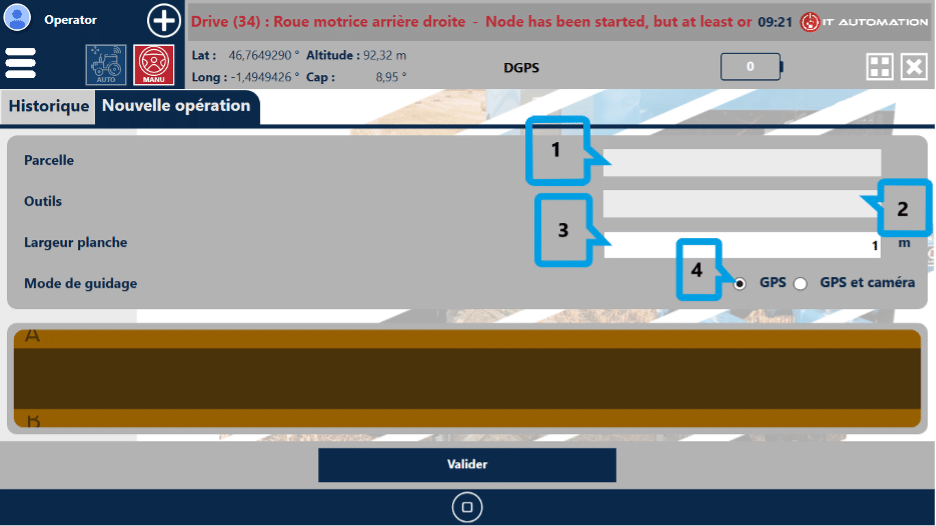
- Se dirigé dans l’onglet “nouvelle opération”
- Sélectionner la parcelle (1)
- Sélectionner l’outil atteler sur Anatis (2)
- Modifié la largeur de planche à 0 (3)
- Sélectionner le type de guidage (GPS ou Caméra + GPS) (4)
- Se positionner en mode MANUEL sur le point GPS de départ (un logo « prêt » en vert sera affiché)
- Sélectionner le mode AUTONOME, confirmé sur la radiocommande avec AUX1 puis reconfirmer sur la boîte de dialogue sur l’IHM.
- Le mode semi-automatique est actif, si vous appuyer sur l’homme mort le robot travail de façon autonome si vous relâcher l’homme mort le robot s’arrêtera.
Avant de lancer une opération de travail en mode AUTONOME, il faut au préalable :
- Vérifier la bonne fermeture des armoires latérales
- Vérifier le bon réglage des caméras (notice ci-jointe)
Après avoir lancé l’opération de travail avec l’homme mort, il est possible d’enclencher le mode AUTONOME, après avoir maintenu l’homme-mort de la radiocommande plus de 30 secondes un message s’affiche indiquant que le mode AUTONOME est prêt. Il suffit donc d’enclencher l’interrupteur (1).
Toutes opérations en mode autonome doivent être effectuées dans un environnement sans obstacle et privé, cet environnement doit posséder la signalétique adéquate pour prévenir de la présence du robot. De plus Une surveillance est requise pour laisser le robot elle doit être réalisée par une personne qualifiée qui a suivi la formation sécurité sur le robot.
En cas d’arrêt du robot, suite à un arrêt d’urgence ou à une perte de signale de la radiocommande, lors de l’opération en mode AUTONOME, une intervention humaine est requise afin de relancer le robot.
Branchement du chargeur de la batterie Lithium-ion
- Brancher le chargeur fourni avec le robot sur le réseau (380V)
- Brancher la batterie au chargeur avec la prise prévue à cet effet. Il n’est pas nécessaire de débrancher la batterie ou de couper l’alimentation du robot.
- Recharger le pack batterie dans une plage de 10°c à 50°c
Changement de voie du robot
Il est possible de changeait la voit du robot (1.45m ; 1.65m ; 1.85m ; 2.05m), pour s’adapter aux différentes taille de planche. Si possible la voie du robot doit être le plus proche possible de la voie du tracteur travaillant sur les mêmes planches. Pour réaliser le changement il faut suivre la démarche suivante.
- Débrancher le pack batterie du robot

- Utiliser un moyen de levageUtiliser les anneaux d’élingage (1) pour lever le pack batterie et soulever les roues avant du sol. Attention, il suffit de lever légèrement les roues.Retirer les boulons permettant de retenir le module de roue. Attention, à l’avant les mouvements du au pivot peuvent surprendre.Ressortir ou rentrer les modules de roues pour atteindre l’axe correspondant à la voit souhaité.Une fois ces actions réalisé sur chacun des module de roue avant reposer les roues au sol et passer aux roues arrières.
- Utiliser un moyen de levage
- Utiliser le système d’attelage (2) pour lever l’arrière du robot. Attention, il suffit de lever légèrement les roues.

- Retirer les boulons permettant de retenir le module de roue. Attention, à l’avant les mouvements du au pivot peuvent surprendre.
- Ressortir ou rentrer les modules de roues pour atteindre l’axe correspondant à la voit souhaité.
- Une fois ces actions réalisées sur chacun des modules de roue avant reposée les roues au sol.
- Une fois la voie souhaité atteinte, rebranché le pack batterie au robot redémarrer le robot, sur L’IHM aller dans les paramètres robot pour modifié la voie dans les deux cercles bleus si dessous.
- Commencer le changement de voie à l’avant du robot

MAINTENANCE
| Niveau d’intervention ANATIS V4 | Définitions | Fréquence | Temps de l’opération | Localisation | Niveau d’outillage (sur 5) |
| Niveau 1 – Préventif / Classique | Graissage des axes du robot | / mois | 30 min | Exploitation | 2 |
| Recharge batterie complète | / mois | 4h30 | Exploitation | 1 | |
| Gonflage des pneumatiques | 6 mois | 20 min | Exploitation | 2 | |
| Changement fusible | 5 min | Exploitation | 1 | ||
| Vérification des glissements vérin | 4 mois | 20 min | Exploitation | 1 |
Dépannage
En cas de dysfonctionnement :
- Si la mise sous tension du robot ne fonctionne pas : vérifiez que les arrêts d’urgence ne soient pas enclenchés, que la batterie soit physiquement branchée au robot et que le coupe-batterie ne soit pas enclenché
Pas de puissance :
- Eteindre le robot puis le rallumer
En cas d’erreur sur la direction des roues :
- Vérifier l’état des vérins dans l’onglet maintenance vérin sur l’IHM.
Absence de RTK :
- Il arrive que la couverture ne soit pas bonne et que le robot perde temporairement le signal RTK. Dans ce cas, le robot s’arrête et se remet en route dès récupération du signal : cela ne nécessite aucune intervention de la part de l’opérateur.
L’outil attelé à l’arrière du robot ne descend pas lors de la commutation de l’interrupteur :
- Déclencher et enclencher à nouveau la puissance sur la radiocommande.
L’outil attelé à l’arrière du robot ne descend pas lors d’une opération en mode automatique :
- Relancer l’opération.
En cas de dysfonctionnement du vérin de translation de l’outil :
- Vérifier que le capteur de position du relevage soit en place et fonctionnel.
Pour le nettoyage du robot, l’utilisation d’un nettoyeur haute pression est proscrite.
Pour toute intervention sur le robot il faut impérativement débrancher la batterie.
Couple de serrage
| Filetage | Couples de serrage en fonction de la classe de qualité des vis et écrous | ||||||||
| 8.8 | 10.9 | 12.9 | |||||||
| M8 | 24 | 33 | 40 | ||||||
| M10 | 47 | 65 | 79 | ||||||
| M12 | 81 | 114 | 136 | ||||||
| M14 | 128 | 181 | 217 | ||||||
| M16 | 197 | 277 | 333 | ||||||
| M18 | 275 | 386 | 463 | ||||||
| M20 | 385 | 541 | 649 | ||||||
| M22 | 518 | 728 | 874 | ||||||
| M24 | 665 | 935 | 1120 | ||||||
| Goujon de roues | M12 x 1,5 | M14 x 1,5 | M18 x 1,5 | M20 x 1,5 | M22 x 1,5 | M24 x 1,5 | |||
| Couples de serrage (Nm) | 90 | 130 | 270 | 350 | 450 | 550 | |||

